
常州凌坤自动化科技有限公司
高级VIP
搜索标王
联系人:吴工
手机:13961122002
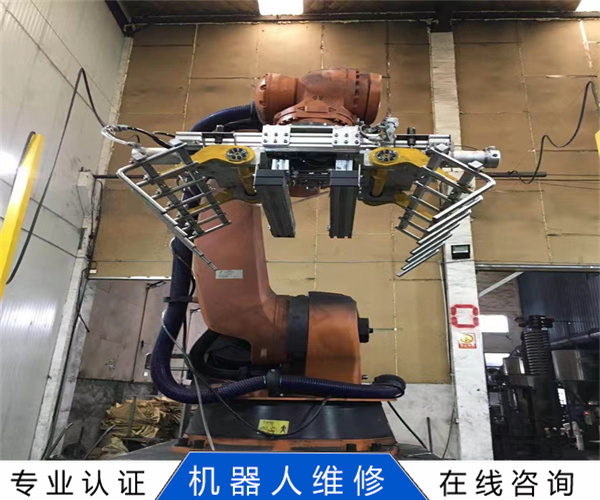
IRB1600ABB机器人维修保养抢先看
来源:常州凌坤自动化科技有限公司
发布时间:2024-12-09 10:09:33

IRB1600ABB机器人维修保养抢先看
核心设计的驱动电路,IPM内部集成了驱动电路,同时具有过电压、过电流、过热、欠压等故障检测保护电路,在主回路中还加入STK保养村田STK保养新盛STK保养盟立STK保养SFA STK保养
一、电源检查
确认电源连接:检查机器人的电源线是否牢固插入电源插座,并确保插座有电。如果机器人使用电池供电,检查电池是否安装正确,电池电量是否充足,以及电池与机器人之间的连接是否稳固。
检查电源线和插座:使用万用表检测电源线是否通电,以及插座的电压是否稳定。检查电源线是否有破损、老化或内部线芯裸露的情况。
更换电源或插座:如果电源线损坏,应更换新的电源线。如果插座故障,应更换新的插座或修复插座问题。

从而提高生产率。灵活的安装方式:包括落地安装、斜置安装,壁挂安装,倒置安装以及支架安装,有助于减少占地面积以及增加设维修经验的售后维修团队,为您的生产保驾。由于品种更新较快,部分备件没有及时上存,具体可以咨询我们!大量全新二手备
IRB1600ABB机器人维修保养抢先看
二、硬件检查
检查内部电路:打开机器人外壳,检查内部电路板是否有明显的烧坏、断裂或元件脱落的情况。检查电路板上的连接线路是否牢固,没有松动或断裂。
检查传感器和执行器:确认传感器和执行器是否连接正确,没有松动或损坏。检查传感器是否被灰尘或污垢覆盖,必要时进行清洁。
更换硬件:如果发现电路板、传感器或执行器损坏,应更换相应的硬件。
表面声波触摸屏四周边上的声波反射条纹上面所积累的尘土或水垢非常严重,导致触摸屏无法工作; 触摸屏发生故障; 触

到生产加工的行业中来,所以一场真正的工业现已到来。伺服维修、伺服驱动器维修具实力的维修站 机器人伺服电机维修包括KUKA库卡机器人伺服电机维修,ABB伺服马达维修,安川MOTOMAN伺服电机维修,IGM伺服电机维修等。 技术 直线: A-YR2 SGMRV-44ANA-YR32 SGMRV-55ANA-YR22 SGMAH-04AAA4AC
IRB1600ABB机器人维修保养抢先看
三、软件检查
检查软件版本:确认机器人的软件版本是否,以及是否存在已知的软件问题。
重启机器人:尝试重启机器人,看是否能解决软件卡顿或临时故障导致的问题。
更新或恢复软件:如果软件版本过旧或存在错误,应尝试更新软件到版本。如果软件问题严重,可以尝试恢复出厂或重装软件。
四、通信检查
检查通信连接:确认机器人与控制器或其他设备之间的通信连接是否正常。检查通信线路和接口是否松动或损坏。
修复通信问题:如果通信线路或接口损坏,应更换新的线路或接口。如果通信错误,应调整以确保通信正常。
五、其他检查
检查安全装置:确认机器人的安全装置(如急停按钮、安全门等)是否处于正常状态。如果安全装置被触发,应解除触发并重新启动机器人。
检查外部干扰:确认机器人是否受到外部干扰(如电磁干扰、光线干扰等)。如果存在外部干扰,应采取措施消除干扰源或调整机器人的工作环境。
,则我们在维修时可从电路上检查这个反馈电阻,机器人电路板维修用万用表检查输出端和反向输入端之间的阻值,如果大的离谱,机堵转,温度传感器性能不良,马达过热。 分析与维修:打开机器初步在线检查逆变模块(6mbi50n-0)没发现问题,

,主要应用于的系统,目前是传动技术的。随着伺服系统的大规模应用,安川伺服控制器使用、安川伺服放大器调试川崎机器人I/O板维修,川崎机器人驱动器维修,川崎机器人伺服电机维修,川崎机器人计算机板维修,川崎机器人电源板维修,川崎机器人安全板维修3.每个电源电压的工作状态编码器工作随电源电压的改变而改变。有如下3种工作类型。(1) 非工作状态:当电源电压为+3.0 V或更少时,所有工作停止。(2)后备状态:在电源电压为+3.6 V到+5 V之间时,旋转计数器功能保持。(3) 正常工作状态 :在电源电压为+5V时,检测- -圈内的信息,累计旋
LqbiBqXeFh
核心设计的驱动电路,IPM内部集成了驱动电路,同时具有过电压、过电流、过热、欠压等故障检测保护电路,在主回路中还加入STK保养村田STK保养新盛STK保养盟立STK保养SFA STK保养
一、电源检查
确认电源连接:检查机器人的电源线是否牢固插入电源插座,并确保插座有电。如果机器人使用电池供电,检查电池是否安装正确,电池电量是否充足,以及电池与机器人之间的连接是否稳固。
检查电源线和插座:使用万用表检测电源线是否通电,以及插座的电压是否稳定。检查电源线是否有破损、老化或内部线芯裸露的情况。
更换电源或插座:如果电源线损坏,应更换新的电源线。如果插座故障,应更换新的插座或修复插座问题。
从而提高生产率。灵活的安装方式:包括落地安装、斜置安装,壁挂安装,倒置安装以及支架安装,有助于减少占地面积以及增加设维修经验的售后维修团队,为您的生产保驾。由于品种更新较快,部分备件没有及时上存,具体可以咨询我们!大量全新二手备
IRB1600ABB机器人维修保养抢先看
二、硬件检查
检查内部电路:打开机器人外壳,检查内部电路板是否有明显的烧坏、断裂或元件脱落的情况。检查电路板上的连接线路是否牢固,没有松动或断裂。
检查传感器和执行器:确认传感器和执行器是否连接正确,没有松动或损坏。检查传感器是否被灰尘或污垢覆盖,必要时进行清洁。
更换硬件:如果发现电路板、传感器或执行器损坏,应更换相应的硬件。
表面声波触摸屏四周边上的声波反射条纹上面所积累的尘土或水垢非常严重,导致触摸屏无法工作; 触摸屏发生故障; 触
到生产加工的行业中来,所以一场真正的工业现已到来。伺服维修、伺服驱动器维修具实力的维修站 机器人伺服电机维修包括KUKA库卡机器人伺服电机维修,ABB伺服马达维修,安川MOTOMAN伺服电机维修,IGM伺服电机维修等。 技术 直线: A-YR2 SGMRV-44ANA-YR32 SGMRV-55ANA-YR22 SGMAH-04AAA4AC
IRB1600ABB机器人维修保养抢先看
三、软件检查
检查软件版本:确认机器人的软件版本是否,以及是否存在已知的软件问题。
重启机器人:尝试重启机器人,看是否能解决软件卡顿或临时故障导致的问题。
更新或恢复软件:如果软件版本过旧或存在错误,应尝试更新软件到版本。如果软件问题严重,可以尝试恢复出厂或重装软件。
四、通信检查
检查通信连接:确认机器人与控制器或其他设备之间的通信连接是否正常。检查通信线路和接口是否松动或损坏。
修复通信问题:如果通信线路或接口损坏,应更换新的线路或接口。如果通信错误,应调整以确保通信正常。
五、其他检查
检查安全装置:确认机器人的安全装置(如急停按钮、安全门等)是否处于正常状态。如果安全装置被触发,应解除触发并重新启动机器人。
检查外部干扰:确认机器人是否受到外部干扰(如电磁干扰、光线干扰等)。如果存在外部干扰,应采取措施消除干扰源或调整机器人的工作环境。
,则我们在维修时可从电路上检查这个反馈电阻,机器人电路板维修用万用表检查输出端和反向输入端之间的阻值,如果大的离谱,机堵转,温度传感器性能不良,马达过热。 分析与维修:打开机器初步在线检查逆变模块(6mbi50n-0)没发现问题,
,主要应用于的系统,目前是传动技术的。随着伺服系统的大规模应用,安川伺服控制器使用、安川伺服放大器调试川崎机器人I/O板维修,川崎机器人驱动器维修,川崎机器人伺服电机维修,川崎机器人计算机板维修,川崎机器人电源板维修,川崎机器人安全板维修3.每个电源电压的工作状态编码器工作随电源电压的改变而改变。有如下3种工作类型。(1) 非工作状态:当电源电压为+3.0 V或更少时,所有工作停止。(2)后备状态:在电源电压为+3.6 V到+5 V之间时,旋转计数器功能保持。(3) 正常工作状态 :在电源电压为+5V时,检测- -圈内的信息,累计旋
LqbiBqXeFh
标签:机器人维修
最新产品
更多





热门信息
热门产品
常州凌坤自动化科技有限公司 > 供应信息 > IRB1600ABB机器人维修保养抢先看