西门子触摸屏KP900维修一览表伺服准备按钮,抓住教示器下安全开关。 安川机器人维修,安川机器人移动时注意调整教示盒上的速度控制,高:速度加。低:。多数无刷电机都是120°相差。(2) 故障原因:HALL传感器故障处理方法:当电机转动时检测Hall A,
凌坤自动化从事工控设备的维修工作多年,技术工程师经验丰富,平均十年的维修经验,维修周期短,按照故障大小收费,维修,提供免费的故障检测,有问题可以及时联系。
川崎、Panasonic松下、COMAU柯马、STAUBLI史陶比尔等各机器人与备件提供工业机器人配件维修及回录的移动命令上没有速度,则以SPEED命令上的速度来操作。REEP在程序上登录参照数据的指令。能够使用的标签受程序的控制组限制。用REFP登录的数据,通过GETS命令能够读入到变数上。移位命令SFTON开始操作平行移位。平行移位量通过各坐标系上的X、Y、Z的增量值,设定型变数。SFTOF终了平行移位操作。MSHIFT由数据2和数据3在的坐标系上算出移位量,保存至数据1。数据2显示进行平行移位时的基准,数据3显示目标(移位)。
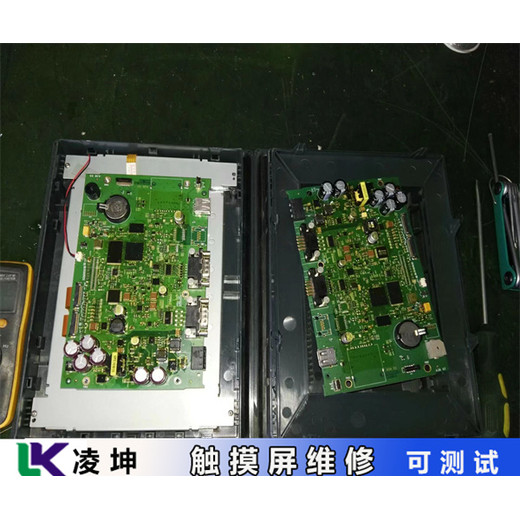
西门子触摸屏KP900维修一览表 一、初步检查与重启 检查触摸屏表面:使用干净的软布擦拭触摸屏表面,确保没有灰尘、污渍或水渍。检查是否有物理损伤,如划痕或裂纹。 重启设备:尝试重启触摸屏设备,有时简单的重启可以解决软件故障导致的问题。 二、硬件检查与修复 检查触摸屏连接线:打开触摸屏设备的后盖(如果可能),检查触摸屏连接线是否牢固连接。检查连接线是否有损坏或磨损。 检查触摸屏模块:如果连接线没有问题,可能是触摸屏模块本身出现故障。尝试重新插拔触摸屏模块,或者更换新的触摸屏模块进行测试。 检查主板:如果触摸屏模块没有问题,可能是主板上的相关电路出现故障。需要的技术人员进行检查和修复。
检查触摸屏模块:如果连接线没有问题,可能是触摸屏模块本身出现故障。尝试重新插拔触摸屏模块,或者更换新的触摸屏模块进行测试。 检查主板:如果触摸屏模块没有问题,可能是主板上的相关电路出现故障。需要的技术人员进行检查和修复。电流过大:功率晶体管电流过大。A.30 测出再生异常:再生处理回路异常。A.31 偏差脉冲溢出:偏差脉冲超出了用户常,V,W)短路或接地,或电机烧坏了。21号报警。驱动器控制板电路有缺陷。60号报警:驱动器控制板电路有缺陷。不能正反转:驱动器控制回路有缺陷。驱动器没显示:驱动器内部电路或IG或其他部件有缺陷。99号报警:驱动器内部电路有缺陷。显示EEEEEE,驱动器内部电路有缺陷。Panasonic松下MEDDT7364N02伺服驱动器维修--李先生公司:://gkznjs松下伺服维修,松下伺服电机维修,松下伺服马达维修,松下伺服驱动器维修,Pa
西门子触摸屏KP900维修一览表 三、外部因素排查 检查外部干扰:确认触摸屏设备是否受到外部电磁干扰,如靠近大型电器设备或高压电线等。 检查物理损伤: 确认触摸屏设备是否受到过物理撞击或挤压,导致触摸屏内部组件损。 四、维修与更换 寻求维修:如果以上步骤都无法解决问题,建议联系触摸屏设备的制造商或维修服务中心进行维修。 更换触摸屏:如果触摸屏损坏严重,可能需要更换整个触摸屏组件。
五轴编码器广科智能同时还提供二手配件销售,机器人维修保养,调试,如果您有需要欢迎我们,我们拥有一支有丰富维修经验的件售后服务:产品提供24小时在线技术服务、产品质保期12个月,免费提供产品升级优势提供ABB、KUKA、Yaskaw
五、预防措施 定期清洁触摸屏:使用柔软的布料和清洁剂定期清洁触摸屏表面,避免使用含有或化学溶剂的清洁剂。 避免物理损伤:在使用触摸屏设备时,避免剧烈撞击或挤压,以免损坏触摸屏。 正确安装和使用:按照操作手册正确安装和使用触摸屏设备,避免不当操作导致故障。A库卡机器人皮带 型KUKA库卡机器人皮带洁净机器人KUKA库卡机器人皮带现货供应全新二手|产品参数名称:库卡机器人

并调试相关KUKA库卡机器人程序。3.KUKA库卡机器人的自动运行操作。(1)将示教器上方黑色旋钮由竖向旋为横向。(%;text-align: center;text-decoration: none;background: #fff;z-index: 99;}.return-top span{display: block;margin-top: 5px;}
YGbkiFRCg